Rundt jul fikk jeg tilsendt enda mer elektronikk til min Raspberry Pi. Jeg oppdaget
Adafruit Industries, et firma som ble grunnlagt av en dame som studerte elektronikk eller noe slikt på MiT, og som har som formål å spre elektronikkens glade budskap. De selger masse kule ting som hver for seg koster nesten ingen penger, som for eksempel
et kort som kan styre 16 servoer og
en analog-digital-konverter. Adafruit har dessuten også gode beskrivelser av hvordan man skal koble ting, samt pythonbiblioteker man kan laste ned gratis. Gode greier.
Jeg kjøpte en servokontroller pluss et par servoer, og etter litt hacking, banning og nærlesing av diverse fora, manualer og dessuten
ArchWiki, fikk jeg servoene til å bevege seg som jeg ville. Så nå har jeg to servoer jeg kan styre fra Python, og hvis jeg investerer i en slik USB-batteripakke som kan forsyne Raspberry Pien med strøm kan jeg sende dem avgårde på egenhånd i en legobil eller noe i den dur. Mange har spurt hva jeg skal bruke dette til, og det har jeg forsåvidt ikke bestemt meg for ennå, men jeg føler at det er veien som er målet her, og at i alle fall ligger verden for mine føtter.
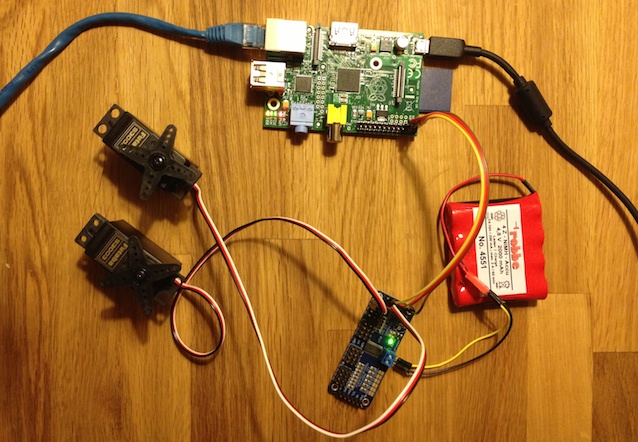
Raspberry Pi, servokontroller, servobatteri og to servoer
Servokontrolleren er forøvrig egentlig en PWM-dings, der PWM står for Pulse Width Modulation. Min tidligere erfaring med servoer kommer stort sett fra barneskolen, da vi lagde kinaputter med fjernstyrt elektrisk tenning ved hjelp av servoer fra den radiostyrte bilen til Trond, og den gangen var dette svart magi for meg. Nå vet jeg at servoene har tre ledninger, en på jord, en på +4.8V, og en som sender en kort puls på +4.8V mange ganger i sekundet. Lengden på den pulsen kan variere, typisk mellom 1 og 2 millisekunder, og lengden på pulsen fortellen servoen hvilken vinkel den skal stå i. Det er forsåvidt fortsatt et lag med svart magi igjen, for jeg aner ikke hvordan elektronikken som omsetter fra pulslengde til vinkel funker, men jeg føler likevel jeg har en litt bedre forståelse av hvordan en servo funker nå.


Comments